



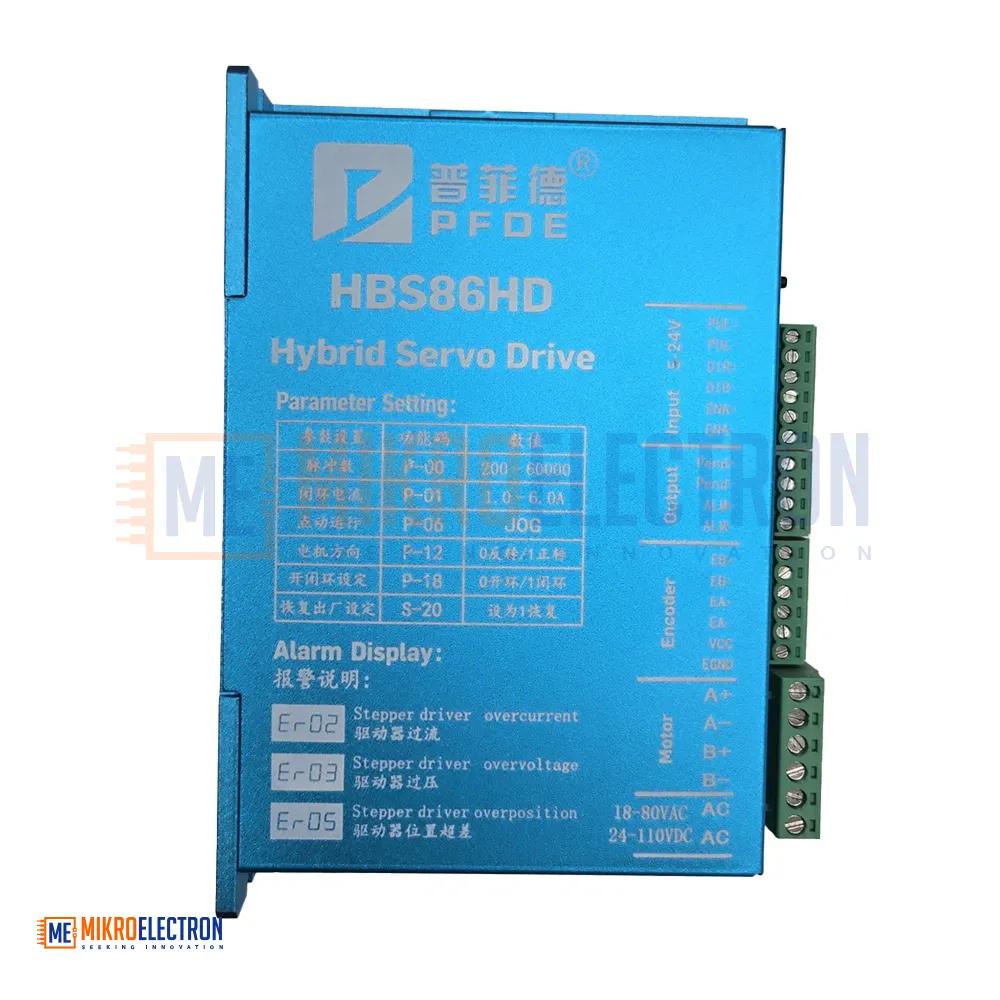


Nema34 12.2Nm 6A Closed Loop Stepper Motor 86HBS120N with Motor Driver HBS86HD and HSS-CABLE-5M
Out Of Stock
General specification:
Current / Phase: 6A
Holding Torque: 12.2N.m
DC Resistance: 0.76Ω±10%
Inertia: 4.0KG.CM2
Inductance / Phase: 8.4MH±20%
Weight: 5.4KGS
Step Angle: 1.8°
Position Accuracy: 1.8°±0.09°
Temp Rise (Max): 80℃
Dielectric Strength: 500VDC
Number of Phase: 2
Radial Play: 0.025mm (LOAD450G)
Axial Play: 0.075mm (LOAD920G)
Insulation Resistance: 100MOHM (500VDC)
Insulation Classes: B
Electrical Indicators:
Input voltage: 18-80VAC (50V typical) or 30-110VDC
Continuous current: 7.5A 20KHz PQM
Maximum pulse frequency: 200K
The default communication rate: 57.6Kbps
Technical Index:
|
Input Voltage |
18~80vac (50v Typical) Or 30~110vdc |
|
|
Continuous Current |
7.5a 20khz PWM |
|
|
Maximum Pulse Frequency |
200k |
|
|
The Default Communication Rate |
57.6kbps |
|
|
Protection |
Overcurrent Action Value Peak Value 12a±10% |
|
|
Overvoltage Voltage Action Value 160vdc |
||
|
Tolerance Alarm Threshold Can Be Through The Handheld Smart Regulator
Set Up |
||
|
Use Environment |
Occasion |
Try To Avoid Dust, Oil Mist And
Corrosive Gas. |
|
Operating
Temperature |
0°C ~ +70°C |
|
|
Storage Temperature |
-20°C ~ 80°C |
|
|
Humidity |
40-90%RH |
|
|
Cooling Method |
Natural Cooling Or Forced Cooling Air |
|
|
Weight |
About 0.58kg |
|
Advantage:
- Without losing step, high accuracy in positioning
- 100% rated output torque
- Small vibration, Smooth and reliable moving at low speed
- Compatible with1000 lines encoder
- Over current, over voltage and over position error protection
Main Application:
Advertising industry, Engraving, packaging, lasers, electron industry, medical industry, Printing industry, woodworking, machinery industry, Ceramic Industry, stone industry and so on.
Control Signal Timing Diagram:

- t1: ENA (enable signal) should be DIR at least 5μs ahead of time, confirm Is high. Generally, it is recommended that ENA+ and ENA- be left floating.
- t2: DIR is at least 6μs ahead of the PUL counting edge to determine its status High or low.
- t3: The pulse width is not less than 2.5μs.
- t4: The low-level width is not less than 2.5μs.