16-CH Servo Motor Controller I2C PCA9685 Servo PWM Driver
Description:
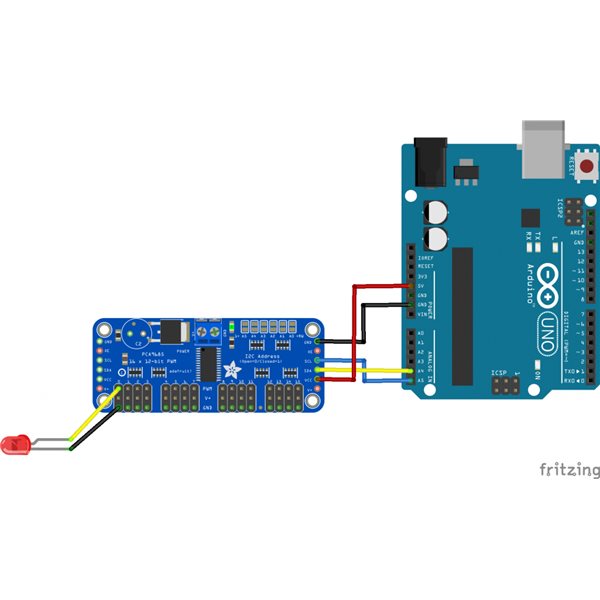
- A product for Arduino that works with official Arduino boards.
- This is a i2c-controlled PWM driver board with a built-in clock, which is quite different from TLC5940 series. You don’t need to continuously send signals and occupy your MCU.
- 5V compatibility, which means that you can use 3.3V MCU to control and drive the output up to 6V (when you want to control the white or blue indicator light, 3.4V+ is also OK).
- 6 address select pins allow you to connect 62 driver boards to one i2C bus, total 992 channels of PWM output.
- About 1.6KHz frequency modulation PWM output.
- Get 12-bit resolution output ready for stepping motor, which means that the 60Hz update rate can reach to 4us resolution.
- Configurable totem-pole output or open-collector output.
- Output enable pin can quick disable all outputs.
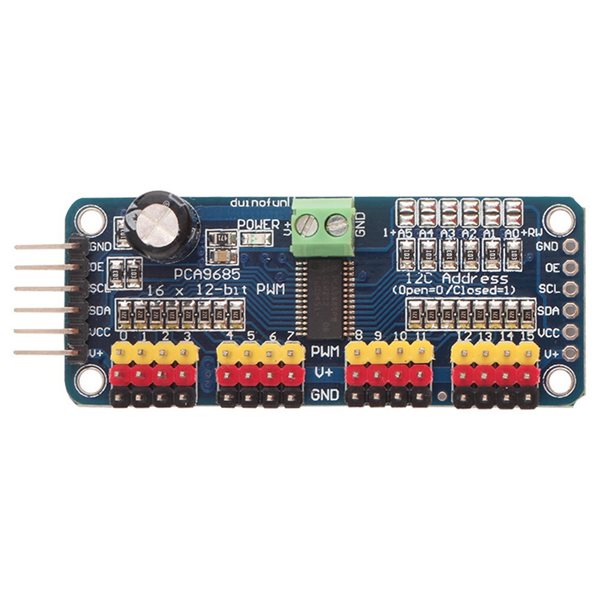
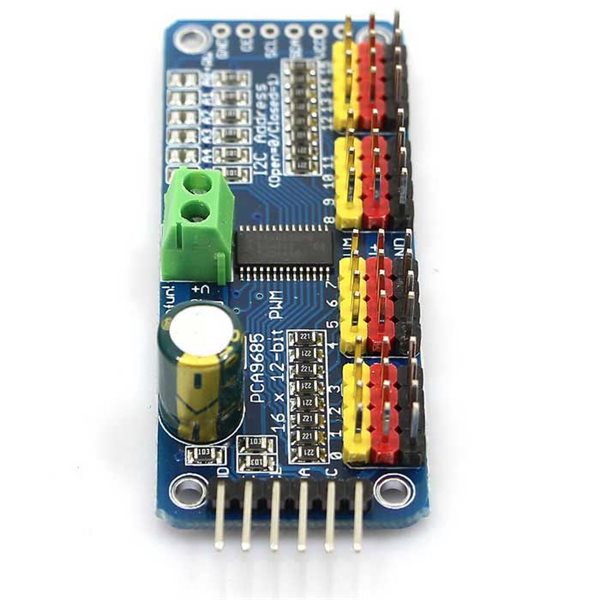
- PCA9685 chip is at the center of the board.
- With power input terminal.
- With green power indicator light.
- Convenient to insert total 16 servos at the same time (the plug of servo is a little large than 0.1", so you can put 4 pairs of 0.1" connectors).
- With reverse polarity protection for input.
- Cascade design.
- Put a bulky capacitor on the V+ line (sometimes you need it).
- Put 220 ohm resistance components onto all PWM output lines, so as to protect them, and you can easily drive the LED.
Kit include:

Mikroelectron Code:
Related Products





subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.