9 Degrees of Freedom - IMU
Description:
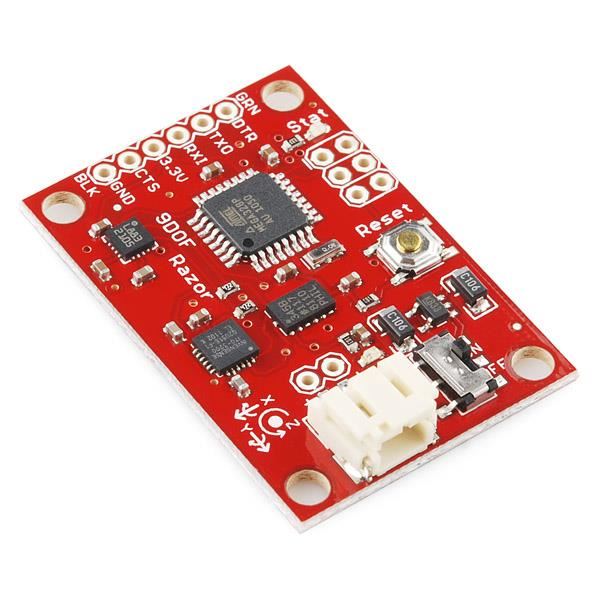
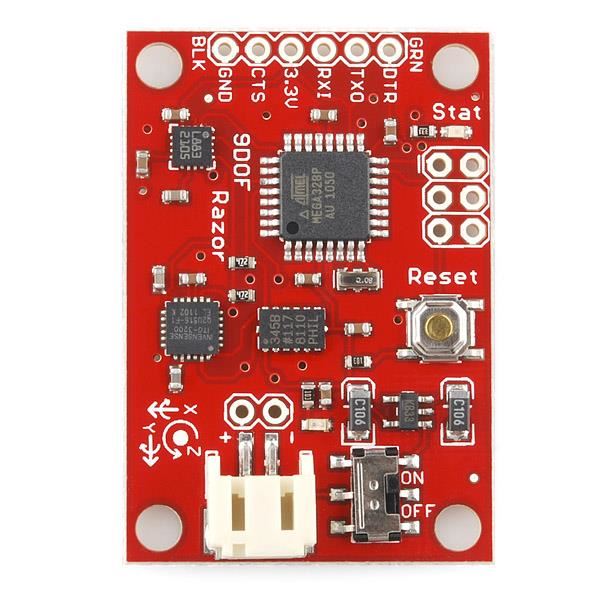
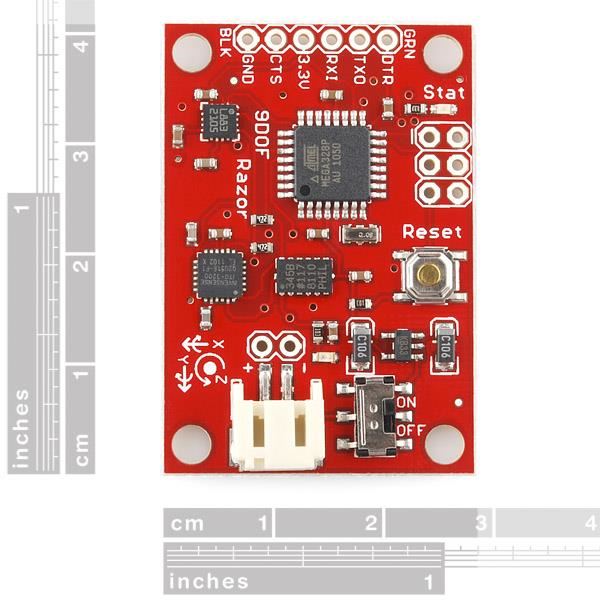
The 9DOF Razor IMU incorporates three sensors - anITG-3200 (MEMS triple-axis gyro) ADXL345 (triple-axis accelerometer)and HMC5883L (triple-axis magnetometer) - to give you nine degrees of inertial measurement. The outputs of all sensors are processed by an on-board ATmega328 and output over a serial interface. This enables the 9DOF Razor to be used as a very powerful control mechanism for UAVsautonomous vehicles and image stabilization systems.
The board comes programmed with the 8MHz Arduino bootloader (stk500v1) and some example firmware that demos the outputs of all the sensors. Simply connect to the serial TX and RX pins with a 3.3V FTDI Basic Breakoutopen a terminal program to 57600bps and a menu will guide you through testing the sensors. You can use the Arduino IDE to program your code onto the 9DOFjust select the ‘Arduino Pro or Pro Mini (3.3v8mhz) w/ATmega328’ as your board.
The 9DOF operates at 3.3VDC; any power supplied to the white JST connector will be regulated down to this operating voltage - our LiPo batteries are an excellent power supply choice. The output header is designed to mate with our 3.3V FTDI Basic Breakout boardso you can easily connect the board to a computer’s USB port. Orfor a wireless solutionit can be connected to the Bluetooth Mate or an XBee Explorer.
Having a hard time picking an IMU? Our AccelerometerGyroand IMU Buying Guide might help!
Note: This product is a collaboration with Jordi Munoz of 3d Robotics. A portion of each sales goes back to them for product support and continued development.
Features:
- 9 Degrees of Freedom on a singleflat board:
- ITG-3200 - triple-axis digital-output gyroscope
- ADXL345 - 13-bit resolution±16gtriple-axis accelerometer
- HMC5883L - triple-axisdigital magnetometer
- Outputs of all sensors processed by on-board ATmega328 and sent out via a serial stream
- Autorun feature and help menu integrated into the example firmware
- Output pins match up with FTDI Basic BreakoutBluetooth MateXBee Explorer
- 3.5-16VDC input
- ON-OFF control switch and reset switch
Documents:
- Schematic
- Eagle Files
- Datasheet (ITG-3200)
- Datasheet (ADXL345)
- Datasheet (HMC5883L)
- Python Graphic interface
- AHRS Code
- AHRS/Head-tracker Tutorial (Thanks Peter!)
- GitHub
- Arduino Code
Related Products





subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.