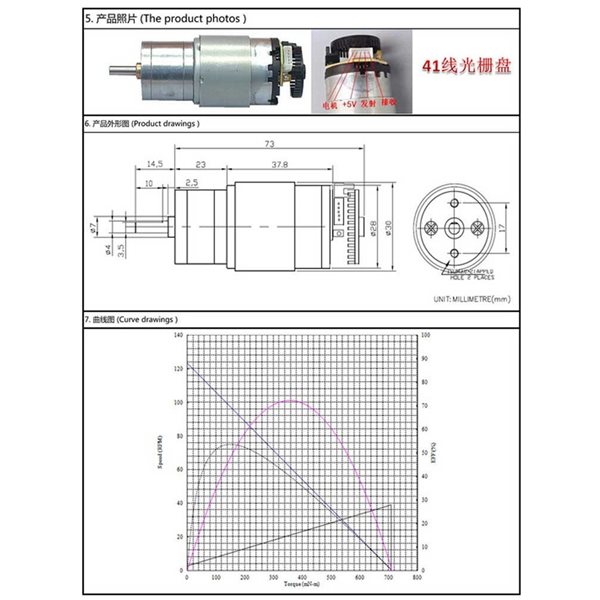
DC geared Motor with Encoder 12V 125RPM



Description:
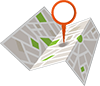
Rated voltage: 12v
Speed: 130 r / min
Load torque: 2kg.cm
Stall Torque: 6.5kg.cm
No-load current: 110mA
Stall Current: 1500mA
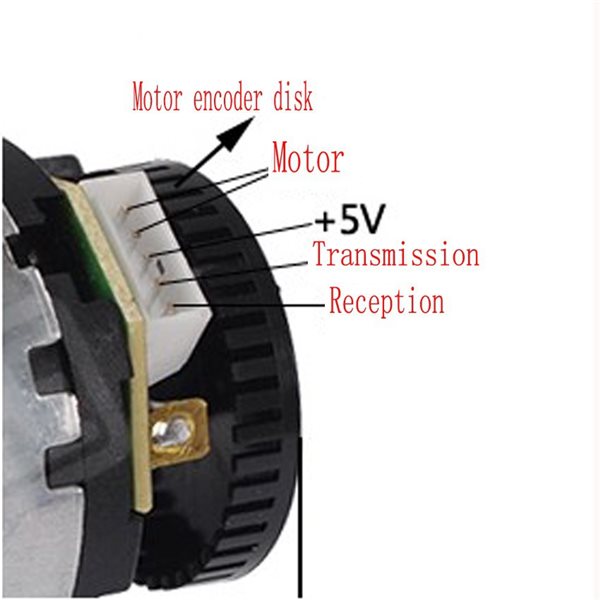
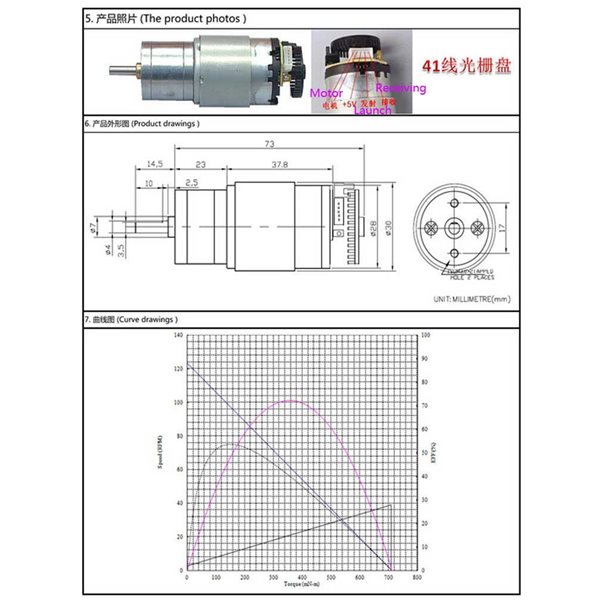
41 line encoder ensure the measurement accuracy, which is the revolution of the motor output 41 pulses, pulse shaping is not integrated trigger circuit section motor PCB, so the need to add a comparator circuit or directly in bunches of two resistors (launch string 390ohm, receive serial 20k), the microcontroller IO port directly, is mounted on the motor due to encoding the primary, and therefore the resolution is quite high, and assuming 1:34 deceleration after use, the reaction on the resolution of the drive shaft 34 * 41 = 1394 lines, making it ideal for single-chip processing, raster resolution of this motor is very suitable for making smart car, and the stability of the high-beam photoelectri
Related Products





subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.