LIDAR-Lite v3 optical distance measurement sensor up to 40m laser ranging module




Description:
LIDAR-Lite v3
Optical distance measurement sensor up to 40m
Laser ranging module
It’s back! This is the LIDAR-Lite v3, a compact optical distance measurement sensor from Garmin™. When space and weight requirements are tight, the LIDAR-Lite v3 soars. The LIDAR-Lite v3 is the ideal solution for drone, robot or unmanned vehicle applications.
This easy-to-use 40-meter laser-based optical ranging sensor has all the core features that made the LIDAR-Lite v2 so popular. Small in form and light in weight with low power consumption of less than 130mA during an acquisition. And it’s user-configurable so you can adjust between accuracy, operating range and measurement time.
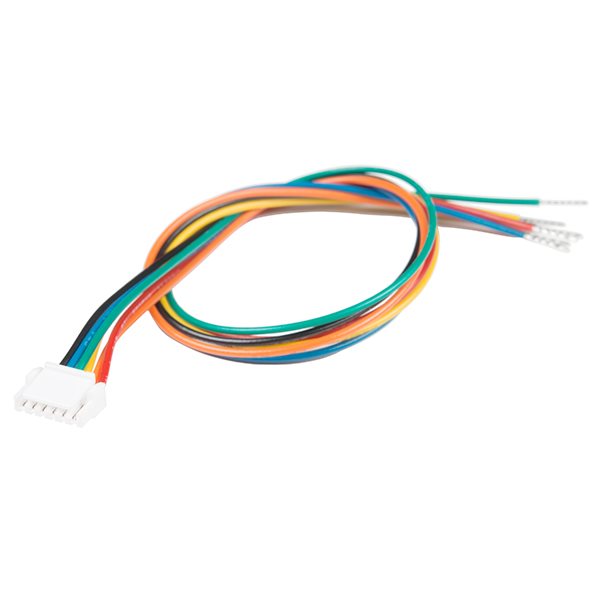
Each LIDAR-Lite v3 features an edge-emitting, 905nm (1.3 watts), single-stripe laser transmitter, 4 m Radian x 2 m Radian beam divergence, and an optical aperture of 12.5mm. The third version of the LIDAR-Lite still operates at 5V DC with a current consumption rate of <100mA at continuous operation. On top of everything else, the LIDAR-Lite is user-configurable, allowing adjustment between accuracy, operating range and measurement time. It can be interfaced via I2C or PWM with the included 200mm accessory cable.
Note: CLASS 1 LASER PRODUCT CLASSIFIED EN/IEC 60825-1 2014. This product is in conformity with performance standards for laser products under 21 CFR 1040, except with respect to those characteristics authorized by Variance Number FDA-2016-V-2943 effective September 27, 2016.
Hardware Overview
Differences Between v3 and v3HP
Functionally, the LIDAR-Lite v3 and LIDAR-Lite v3HP are quite similar. The primary differences are listed here:
| Specs | LIDAR-Lite v3 | LIDAR-Lite v3HP |
|---|---|---|
| Update Rate | 500 Hz | > 1kHz |
| Current Consumption (idle) | 105 mA | 65 mA |
| Current Consumption (acquisition) | 130 mA | 85 mA |
| Casing | None | IPX7 rated casing |
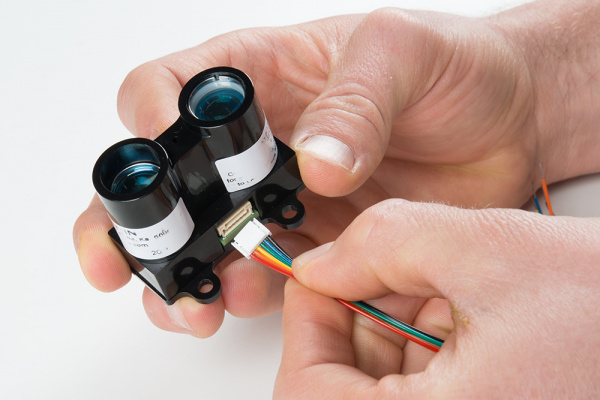
Case
The LIDAR-Lite has two tubes on the front that contain a transmitter (laser) and receiver. You’ll want to face these toward your target.

On the side, you'll find an electrical port that connects to the included 6-wire cable. Plug in the wire harness to the port to break out the pins.
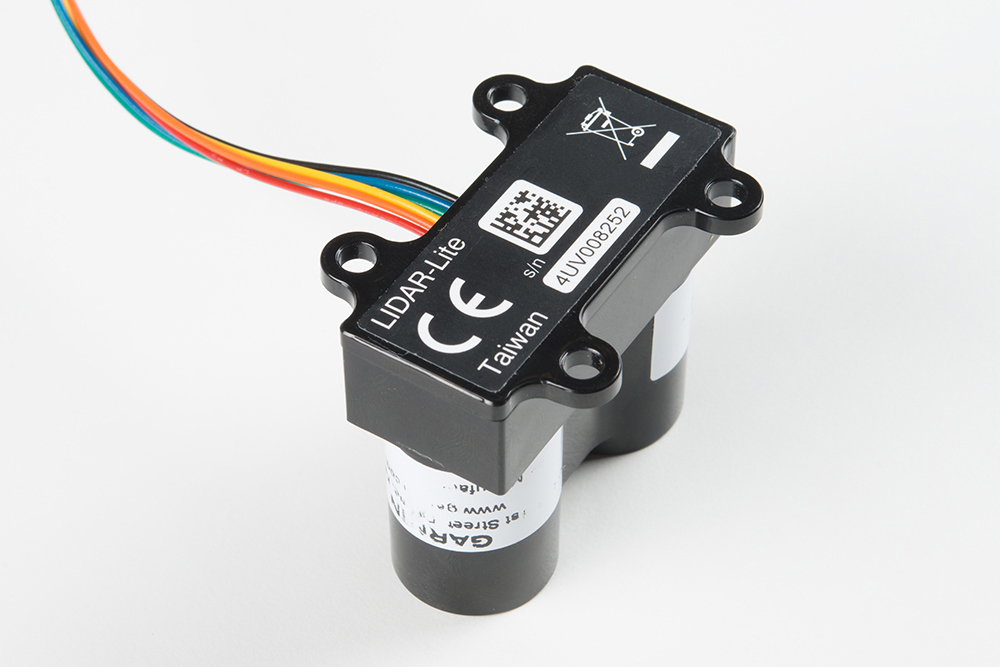
On the back, you’ll find 4 mounting holes that are designed to accept #6 or M3.5 screws or bolts.
Wires
The LIDAR-Lite has 6 wires that can be used to communicate with the sensor.
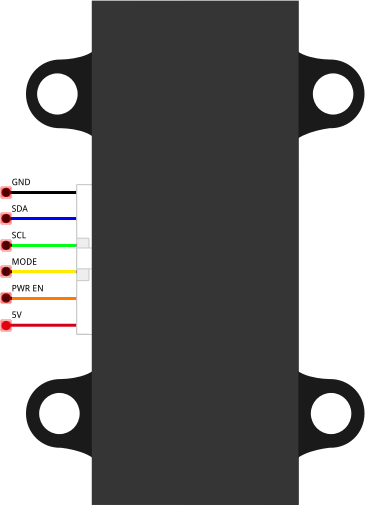
NOTE: This is looking at the back of the unit
| Color | Pin | Description |
|---|---|---|
| Red | 5V | Power (5V) |
| Orange | PWR EN | Power enable (internal pullup) |
| Yellow | MODE | Mode control (for PWM mode) |
| Green | SCL | I2C clock |
| Blue | SDA | I2C data |
| Black | GND | Ground |
Power
Both the LIDAR-Lite v3 as well as the LIDAR-Lite v3HP units require between 4.5V to 5.5V of DC power to operate (nominally, 5V). The LIDAR-LITE v3 can draw up to 135 mA of current during continuous operation (105 mA at idle). Contrarily, the v3HP unit draws up to 85 mA of current during continuous operation (65 mA at idle). To maintain a level voltage, Garmin recommends putting a 680 μF capacitor between power (5V) and ground (GND) as close to the LIDAR unit as possible.
Hardware Assembly
Follow the diagram below to connect the LIDAR unit to a RedBoard or other Arduino-compatible board. The LIDAR-Lite can communicate over I2C as well as use a pulse-width modulated (PWM) signal to denote measured distances. For this guide, we will show how to use I2C to communicate with the LIDAR unit.
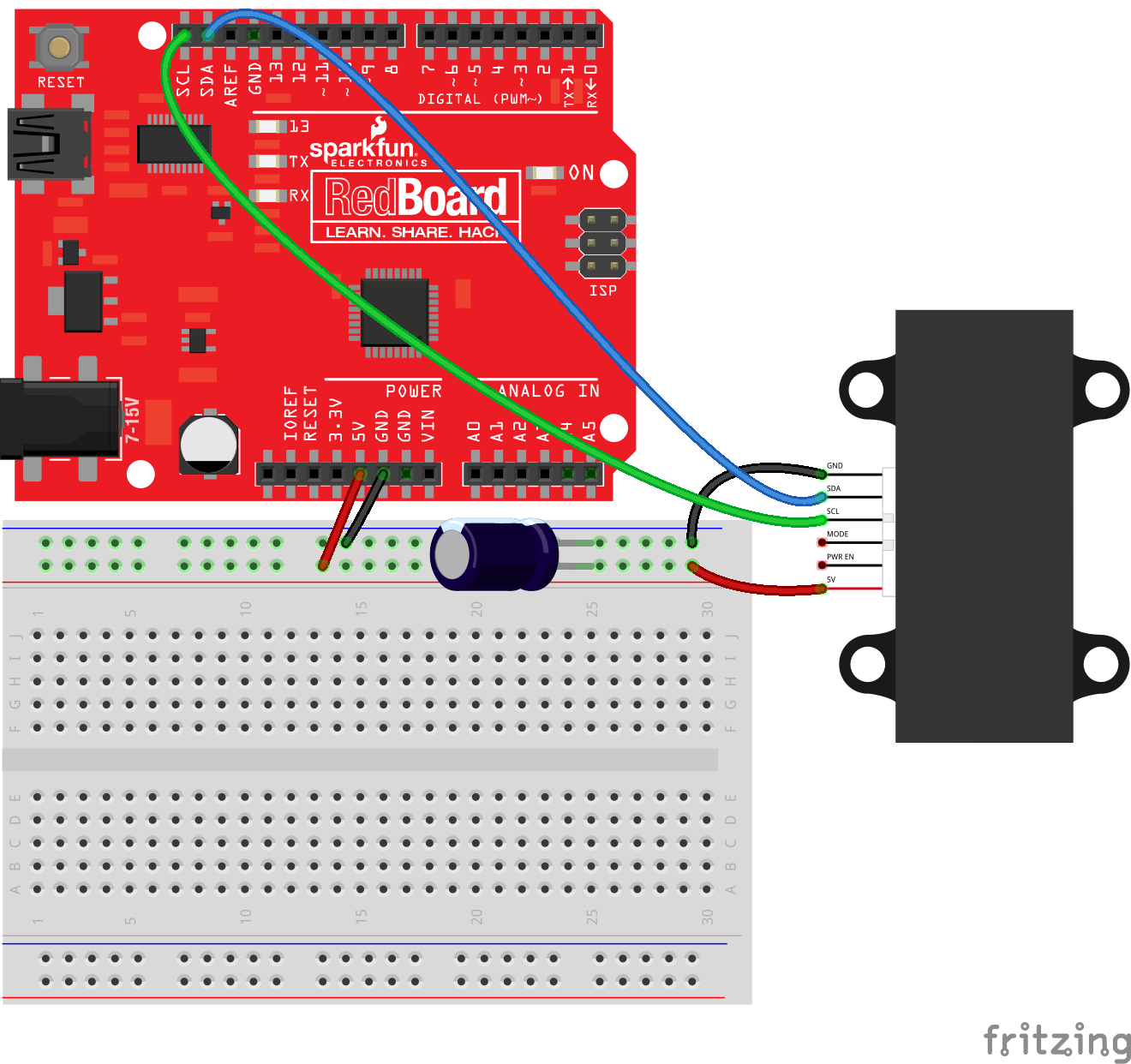
Click on the image to enlarge it
Software
Garmin maintains an Arduino library to make working with the LIDAR-Lite very easy. Visit the GitHub repository, or click the button below to download the library.
DOWNLOAD THE GARMIN LIDAR-LITE V3 ARDUINO LIBRARY
Note: This example assumes you are using the latest version of the Arduino IDE on your desktop. If this is your first time using Arduino, please review our tutorial on installing the Arduino IDE. If you have not previously installed an Arduino library, please check out our installation guide.
Open a new Arduino sketch, and copy in the following code:
/**
* LIDARLite I2C Example
* Author: Garmin
* Modified by: Shawn Hymel (SparkFun Electronics)
* Date: June 29, 2017
*
* Read distance from LIDAR-Lite v3 over I2C
*
* See the Operation Manual for wiring diagrams and more information:
* http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf
*/
#include <Wire.h>
#include <LIDARLite.h>
// Globals
LIDARLite lidarLite;
int cal_cnt = 0;
void setup()
{
Serial.begin(9600); // Initialize serial connection to display distance readings
lidarLite.begin(0, true); // Set configuration to default and I2C to 400 kHz
lidarLite.configure(0); // Change this number to try out alternate configurations
}
void loop()
{
int dist;
// At the beginning of every 100 readings,
// take a measurement with receiver bias correction
if ( cal_cnt == 0 ) {
dist = lidarLite.distance(); // With bias correction
} else {
dist = lidarLite.distance(false); // Without bias correction
}
// Increment reading counter
cal_cnt++;
cal_cnt = cal_cnt % 100;
// Display distance
Serial.print(dist);
Serial.println(" cm");
delay(10);
}
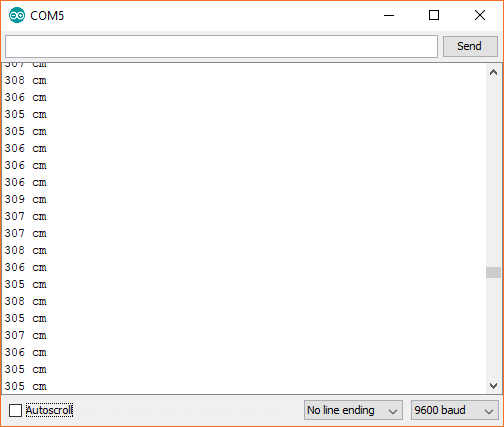
Upload the program, and open a Serial Monitor. You should see distance measurements (in cm) being printed.
Resources and Going Further
Now that you’ve successfully got your LIDAR up and running, it’s time to incorporate it into your own project!
For more information, check out the resources below:
Features:
- Range: 0-40m Laser Emitter
- Accuracy: +/- 2.5cm at distances greater than 1m
- Power: 4.75--5V DC; 6V Max
- Current Consumption: 105mA idle; 130mA continuous
- Rep Rate: 1--500Hz
- Laser Wave Length/Peak Power: 905nm/1.3 watts
- Beam Divergence: 8m Radian
- Optical Aperture: 12.5mm
- Interface: I2C or PWM
- 20 x 48 x 40 mm (0.8 x 1.9 x 1.6 inches)
Documents:
Related Products





subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.