SUMO Symtec Q Gearmotor (12V 1450 RPM 9.28:1 44 Kgcm)



Description:
It is produced for robot projects because of its high power output and functionality. They are very fast & agile motors. Symtec gearboxes are strong and hardened, and the motor side is manufactured for high torques.
Solid 3D models are available upon request.
*We tested these motors from 12V to 24V; they work well and handle overvoltage good.
**This torque value is tested. While testing, you can see the current graph on the right side.
Suitable for these type robots:
- Combat Robots
- Sumo Robots (Magnetic & Non-Magnetic)
- Explorer Robots
- All Terrain Robots (From 3kg to 20kg)
- Electronic Skateboards (With extra reduction)
Sure, you can use motors for any idea that you imagine.
Double Bearing Supported Shaft
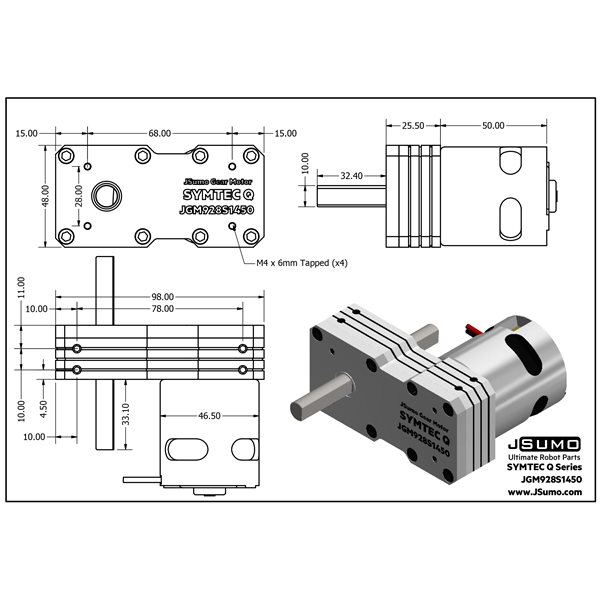
We didn't use 6mm diameter shafts for these special motors. We had used hardened 10mm ⌀ shafts. Output shaft is supported by double bearings. It provides resistance to high speed and torque impacts.
Mounting Symtec Gear Mtors to Robot Bodies
For this purpose, the gear motor comes with 4 M4 x 6 mm tapped holes at 3 sides (Front, Top & Bottom). You can easily attach your robot. Also motor design is symmetrical, which will help you on placing at your design.
Is this motor similar to Maxon Motor?
Yes, These motor series are good for high power projects. But sure not very efficient as high end, super expensive Swiss made Maxon motors.
Which motor driver should I use?
Minimum 30 Ampere drivers suggested. We recommend Cytron 40A Drivers, ZeroLag Driver (best for sumo robots) and similar Sabertooth DC drivers. Also please use 12 AWG soft silicone wires.
What PWM frequency is suitable?
We suggest a minimum 3khz. Motors can be driven by 3 to 20 Khz without any problem. But we don't suggest Arduino's standart base frequency (491 hz) for driving motors. If you want to know how to change the Arduino PWM base frequency please look at the description of ZeroLAG drivers.
Suitable Wheel Models
Motor shaft to gearbox side distance is 24mm. So depending on your assembly minimum +48mm diameter wheels can be used.
Maintenance of Symtec Motors
Motors are coming to you prelubricated but depending on usage you may need to add extra lube for gears. For lubrication you should use thich grease oil for gears and WD40 for motor brushes.
Caution:
In order to withstand high torques in the engine, larger gears are used compared to standard, common gearbox models. These gears can make noise during operation. Please be aware.
Related Products





subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.