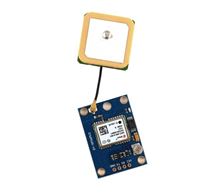
Skylab GPS Module MT3329 SKM53 w/ Embedded GPS Antenna Arduino Compatible




Description:
Skylab GPS Module MT3329 SKM53 w/ Embedded GPS Antenna Arduino Compatible
SKM53 Series with embedded GPS antenna.It is based on MediaTek3329 single-chip architecture.SKM53 can be applied in a portable device and receiver like PND, GPS mouse, car holder, personal locator, speed camera detector and vehicle locator.
Features
- Ultra high sensitivity: -165dBm
- 22 tracking/66 acquisition-channel receiver
- WAAS/EGNOS/MSAS/GAGAN support
- NMEA protocols (default speed: 9600bps)
- Internal back-up battery and 1PPS output
- One serial port and USB port (option)
- Embedded patch antenna 18.2 x 18.2 x 4.0 mm
- Operating temperature range: -40 to 85
- RoHS compliant (Lead-free)
- Tiny form factor 30mm x20mm x 11.4mm
Specifications:
Receiver Type | L1 frequency band, C/A code 22 Tracking / 66 Acquisition-Channel | |
Sensitivity | Tracking Acquisition | -165dBm -148dBm |
Accuracy | Position Velocity Timing (PPS) | 3m 3D RMS without SA 0.1m/s without SA 60ns RMS |
Acquisition Time | Cold Start Warm Start Hot Start Re-Acquisition | 36s 33s 1s <1s |
Power Consumption | Tracking Acquisition Sleep/Standby | <30mA 3V Vcc 40mA TBD |
Navigation Data Update Rate | 1Hz | |
Operational Limits | Altitude Velocity Acceleration | Max 18,000m Max 515m/s Less than 4g |
| Antenna Specifications | OutlineDimension Center Frequency Bandwidth Impedance Axial Ratio Polarization | 18.2 x 18.2 x 4.0 mm 1575 3 MHz 10 MHz min 50 3 dB max RHCP |
| Mechanical requirements | Dimension Weight | 30mm x20mm x 11.4mm 9g |
| Power consumption | VCC Current | 5V 5% 55mA(typical) |
| Environment | Operating temperature Storage temperature Humidity | 40 ~ +85 (w/o backup battery) 0 ~ +125 |
About Skm53 GPS Module
Skm53 outputs data as NMEA-0183 (National Marine Electronics Association) protocol. NMEA protocol outputs data against some commands such as GGA, GLL, GSA, GSV, RMC, VTG, ZDA and DTM. The module has its default NMEA-0183 factory output setting which is only GGA, GSA ,GSV, and RMC are operational and baud rate is set to 9600 bps.
NMEA commands and their functions

Decoding NMEA commands OR getting data from commands output
Arduino GPS module interface circuit diagram

Kit include:
1 x Skm53 GPS Module
Mikroelectron Code:
| //Property off: www.microcontroller-project.com * | |
| //Written by : Usman Ali Butt * | |
| //Dated : 11/6/2017 * | |
| //********************************************************* | |
| #include <TinyGPS.h> | |
| #include <SoftwareSerial.h> | |
| SoftwareSerial GPS(2,3); //RX, TX | |
| //I used softserial because pins 0, and 1 are for | |
| //communicating with pc/laptop | |
| TinyGPS gps; | |
| void gpsdump(TinyGPS &gps); | |
| unsigned long fix_age; | |
| bool feedgps(); | |
| void getGPS(); | |
| long lat, lon; | |
| float LAT, LON; | |
| void setup(){ | |
| GPS.begin(9600); //GPS baud rate 9600 bps | |
| Serial.begin(115200); //Pc/Laptop to Arduino communication at 115200 bps | |
| } | |
| void loop(){ | |
| long lat, lon; | |
| unsigned long fix_age, time, date, speed, course; | |
| unsigned long chars; | |
| unsigned short sentences, failed_checksum; | |
| // retrieves +/- lat/long in 100000ths of a degree | |
| gps.get_position(&lat, &lon, &fix_age); | |
| // time in hh:mm:ss, date in dd/mm/yy | |
| gps.get_datetime(&date, &time, &fix_age); | |
| int year = date % 100; | |
| int month = (date / 100) % 100; | |
| int day = date / 10000; | |
| int hour = time / 1000000; | |
| int minute = (time / 10000) % 100; | |
| int second = (time / 100) % 100; | |
| Serial.print("Date: "); | |
| Serial.print(year); Serial.print("/"); | |
| Serial.print(month); Serial.print("/"); | |
| Serial.print(day); | |
| Serial.print(" :: Time: "); | |
| Serial.print(hour); Serial.print(":"); | |
| Serial.print(minute); Serial.print(":"); | |
| Serial.println(second); | |
| getGPS(); | |
| Serial.print("Latitude : "); | |
| Serial.print(LAT/100000,7); | |
| Serial.print(" :: Longitude : "); | |
| Serial.println(LON/100000,7); | |
| } | |
| void getGPS(){ | |
| bool newdata = false; | |
| unsigned long start = millis(); | |
| // Every 1 seconds we print an update | |
| while (millis() - start < 1000) | |
| { | |
| if (feedgps ()){ | |
| newdata = true; | |
| } | |
| } | |
| if (newdata) | |
| { | |
| gpsdump(gps); | |
| } | |
| } | |
| bool feedgps(){ | |
| while (GPS.available()) | |
| { | |
| if (gps.encode(GPS.read())) | |
| return true; | |
| } | |
| return 0; | |
| } | |
| void gpsdump(TinyGPS &gps) | |
| { | |
| //byte month, day, hour, minute, second, hundredths; | |
| gps.get_position(&lat, &lon); | |
| LAT = lat; | |
| LON = lon; | |
| { | |
| feedgps(); // If we don't feed the gps during this long routine, | |
| //we may drop characters and get checksum errors | |
| } | |
| } |
Related Products
-

-
GPS APM2.5 NEO-6M Module
13 JD -

-

-

subscribe to our weekly newsletter
We are an online electronics store based in Jordan-Amman. The products we sell ranges from electronic products to modules and much more.
- AMMAN, Jordan. University Street, Khalifa Building 3rd floor
- Mobile: +962 7900 621 96, +962 65344772, +9627 8877 5522
- Phone: +962 6 5344772
- Fax: +96265344778
- Email: info@mikroelectron.com

2024 © Mikroelectron. ALL Rights Reserved. | Distributor Area
Made With By Tashfier.